Visually realistic and physically faithful DLO simulation
Deformable linear objects (DLOs) such as wires, cables, and ropes are common in robotic manipulation tasks, yet simulating them with both visual realism and physical accuracy remains challenging. Existing visual methods rely on procedural geometric primitives that lack physically grounded deformation, while physics-based approaches often approximate DLOs as rigid-link chains or generic soft bodies — failing to capture the bending, twisting, and shear mechanics of slender elastic structures.
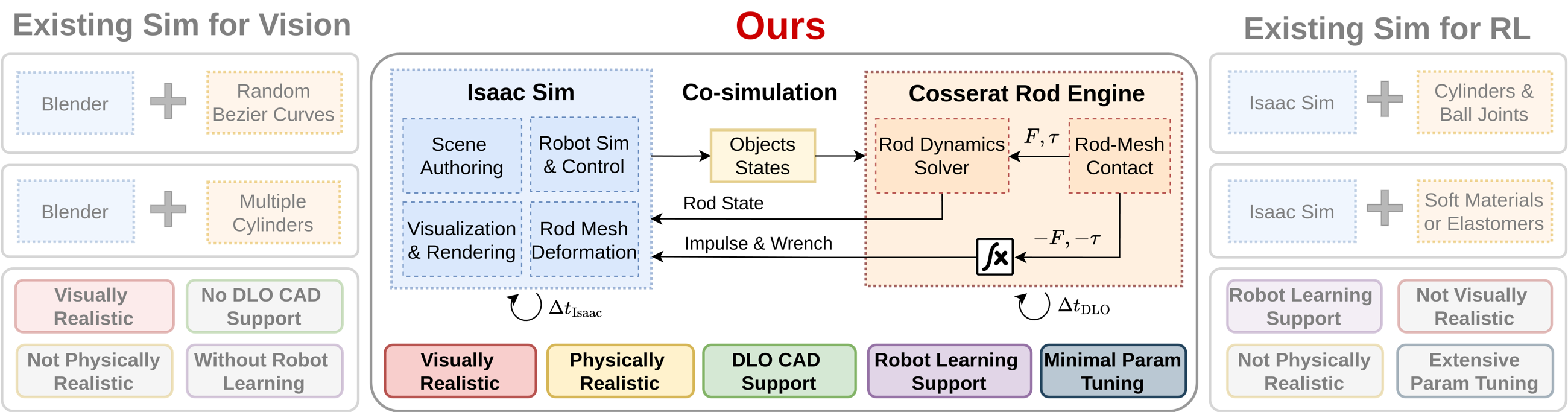
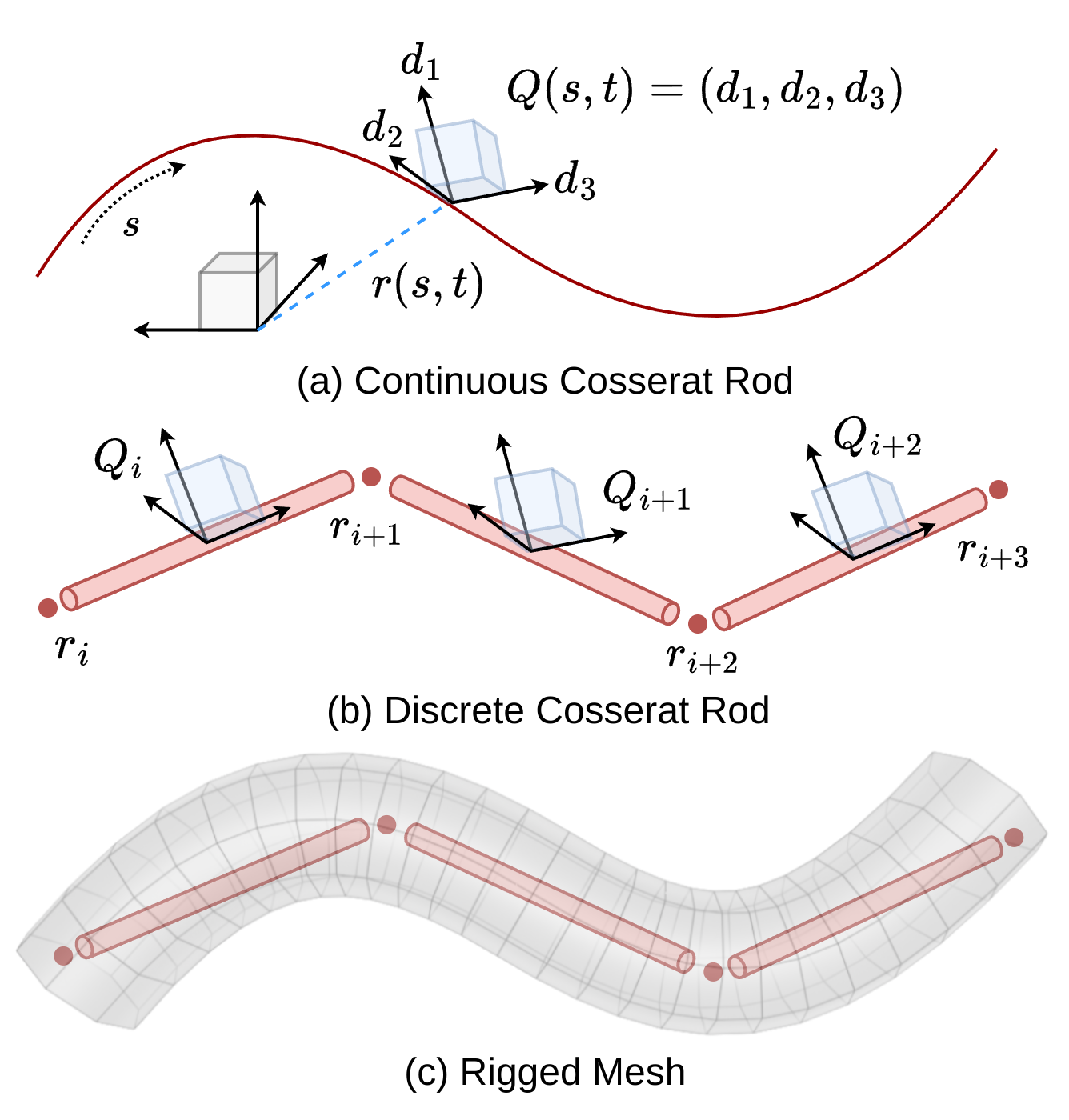
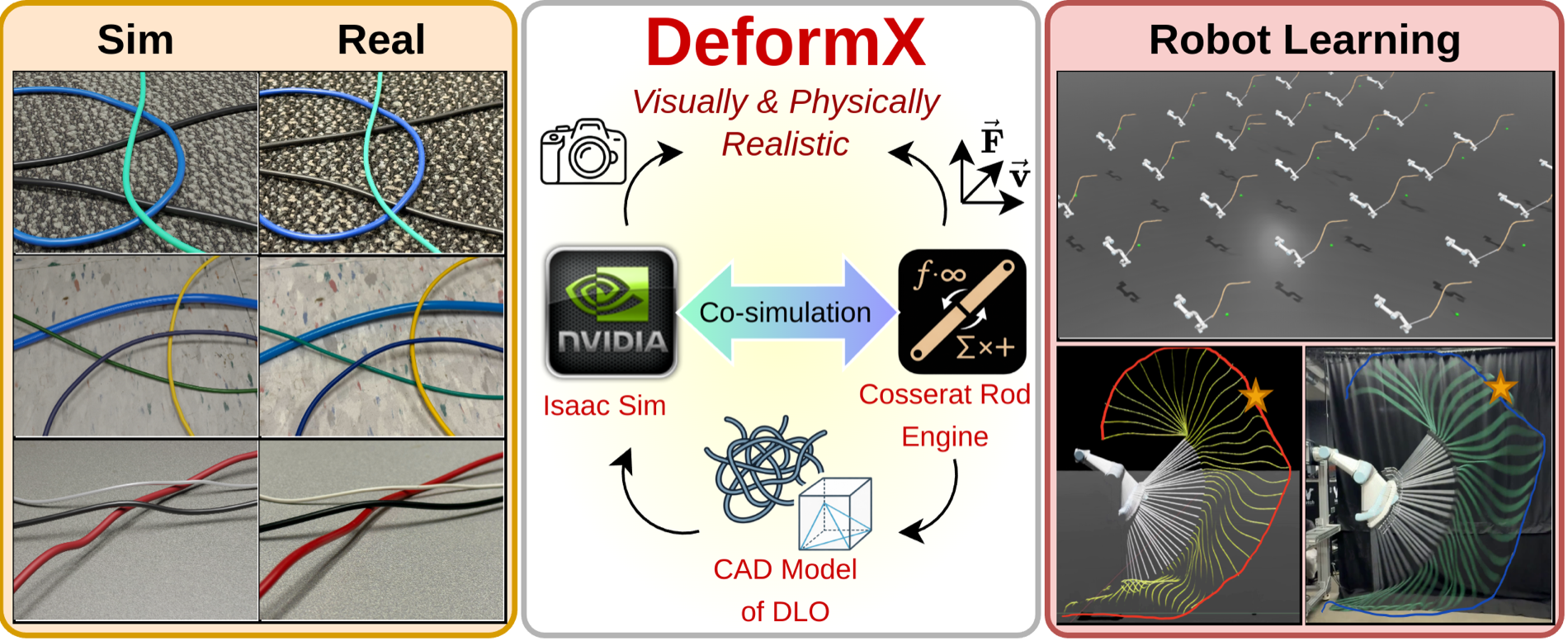
We introduce DeformX, a co-simulation framework that integrates a dedicated Cosserat rod physics engine with NVIDIA Isaac Sim, enabling DLO simulations that are both physically faithful and visually realistic. The Cosserat rod engine simulates the dynamics and self-collisions of DLOs, and contact interactions with arbitrary free-form meshes. For high-fidelity visualization, we employ mesh skinning to map discrete rod deformations onto imported CAD models — to our knowledge the first framework to unify realistic visualization, principled physics, and robot-learning compatibility.
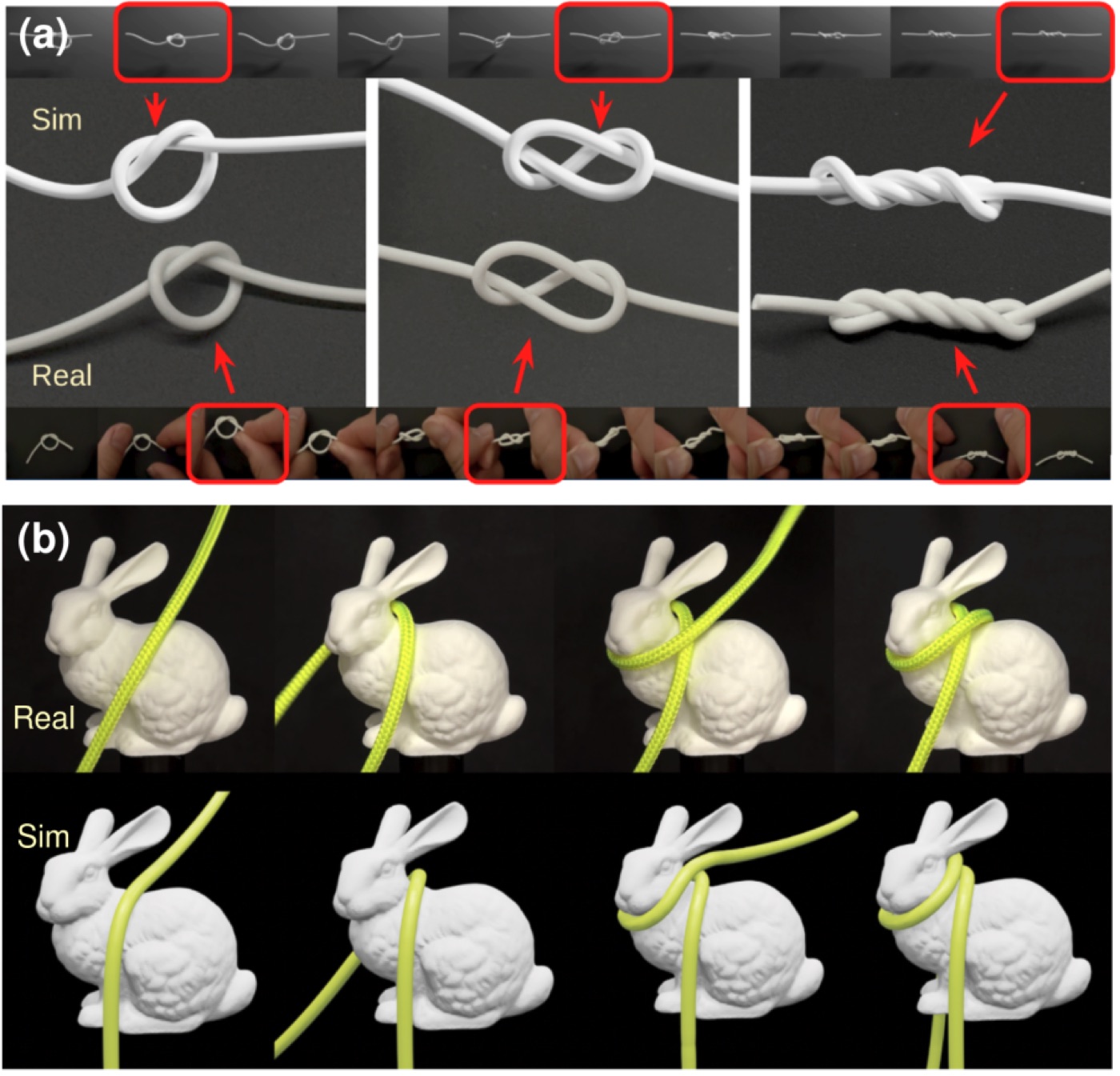
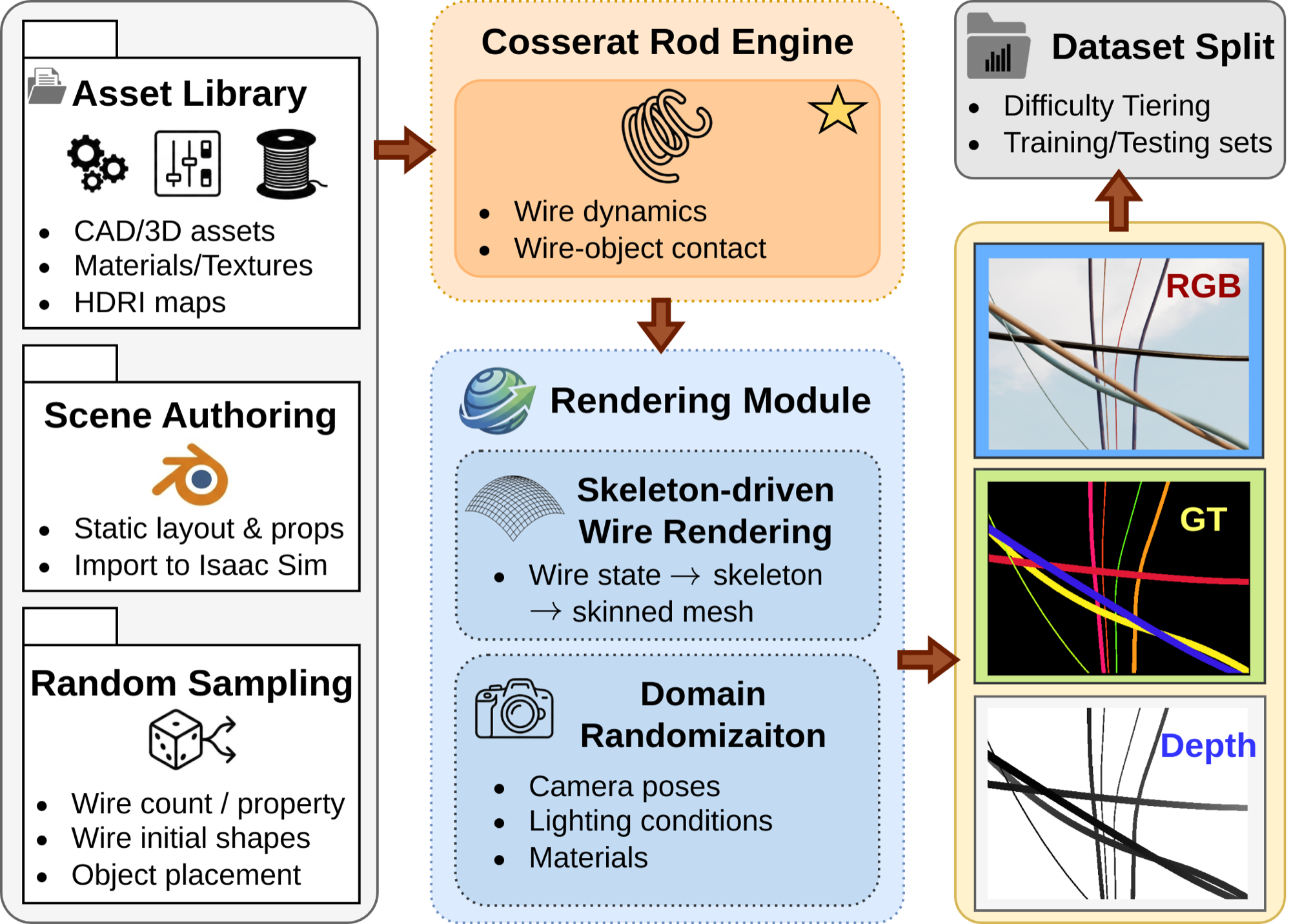
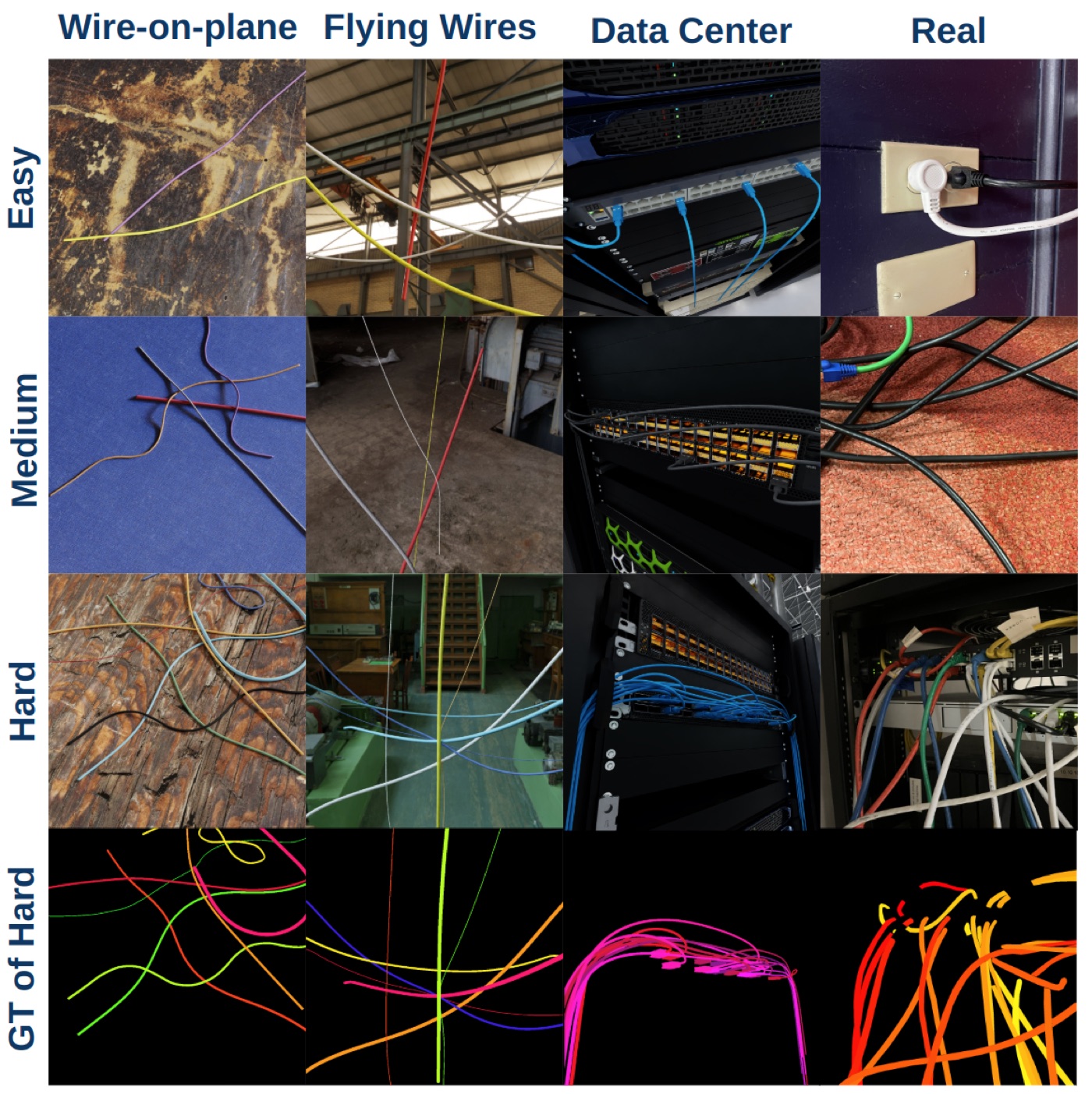
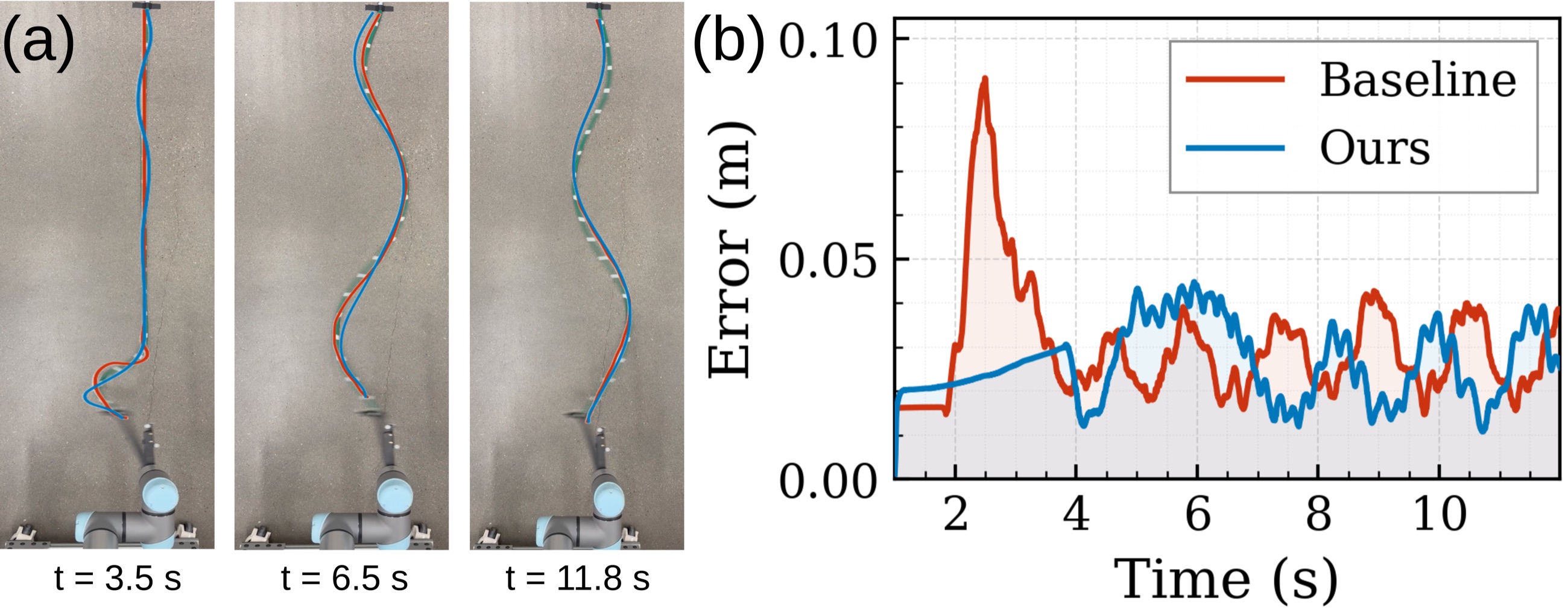
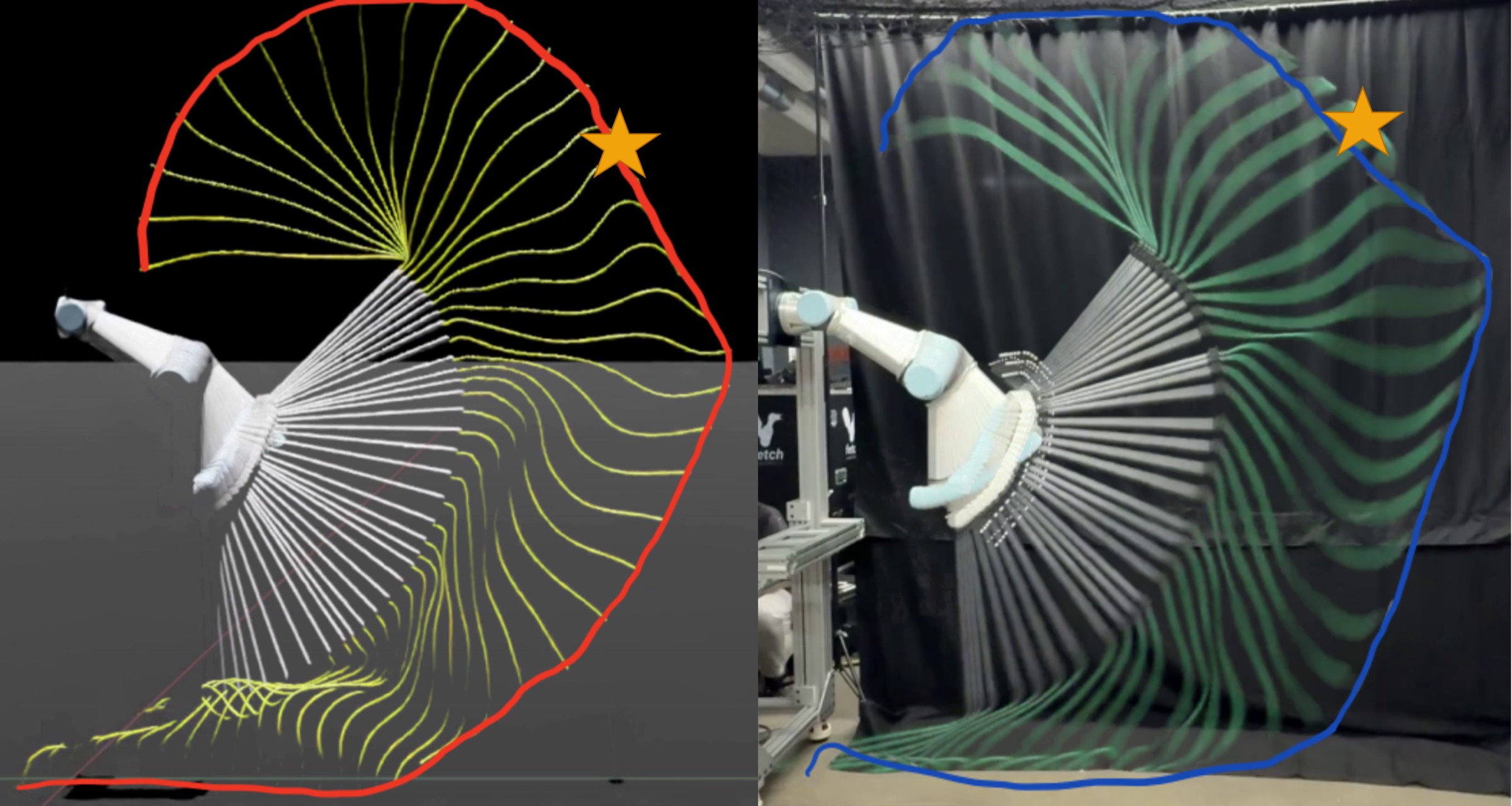
We demonstrate its versatility across synthetic data generation and policy learning, and validate fidelity against real-world experiments. Fine-tuning SAM3 on DeformX-generated data yields a 10.2% mAP@75 improvement in real-image wire segmentation, and a rope-swinging policy trained entirely in DeformX achieves a mean target-hitting error of 6.6 cm on a UR5e manipulator in the real world.